|
Foi possível desenvolver um robot móvel simples, tendo esse a
finalidade de seguir de forma autónoma sobre um percurso previamente traçado.
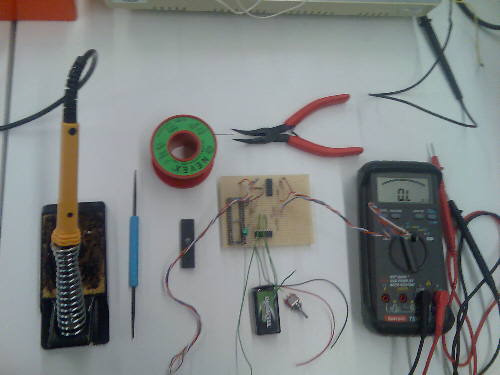
Este foi projectado e implementado em termos de hardware e software. Para tal,
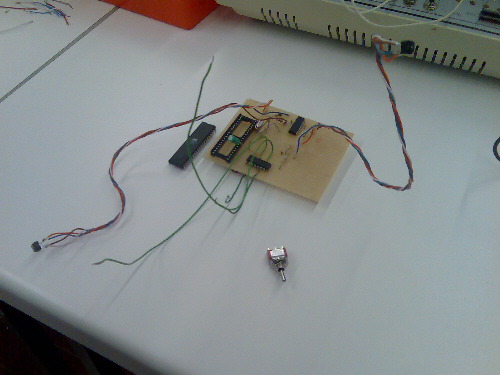
foram utilizados recursos de hardware variados, tais como, um microcontrolador
da família 8051/52 (ATMEL AT89C52),
L293D, LM324, KA7805, Sensores
OPB608R e Motores DC, assim como se
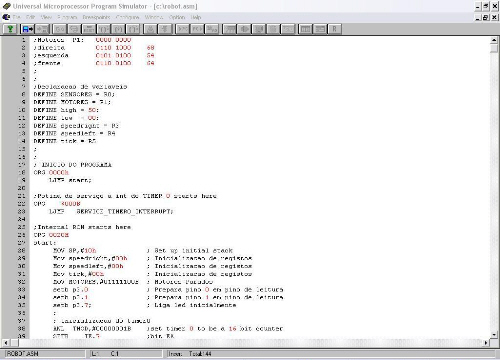
utilizaram os programas UMPS e EXPRO para trabalhar em termos de
software.
Escolheu-se ter como programa principal a leitura dos
sensores, em loop, e usar um temporizador com uma interrupção interna.
Este trabalho proporcionou-nos várias aprendizagens. Em
primeiro lugar, quanto aos passos a seguir na implementação de um projecto. Em
segundo lugar, quanto à forma como são programados os circuitos integrados. Em
terceiro lugar, quanto à utilidade e forma de utilização das interrupções.
Julgamos que todas estas aprendizagens serão de extrema importância e utilidade
em futuros projectos.
|